-
- 厦门阿米控技术有限公司
-
全国服务咨询热线:
18030170117
18030170117

热门搜索:



产品描述
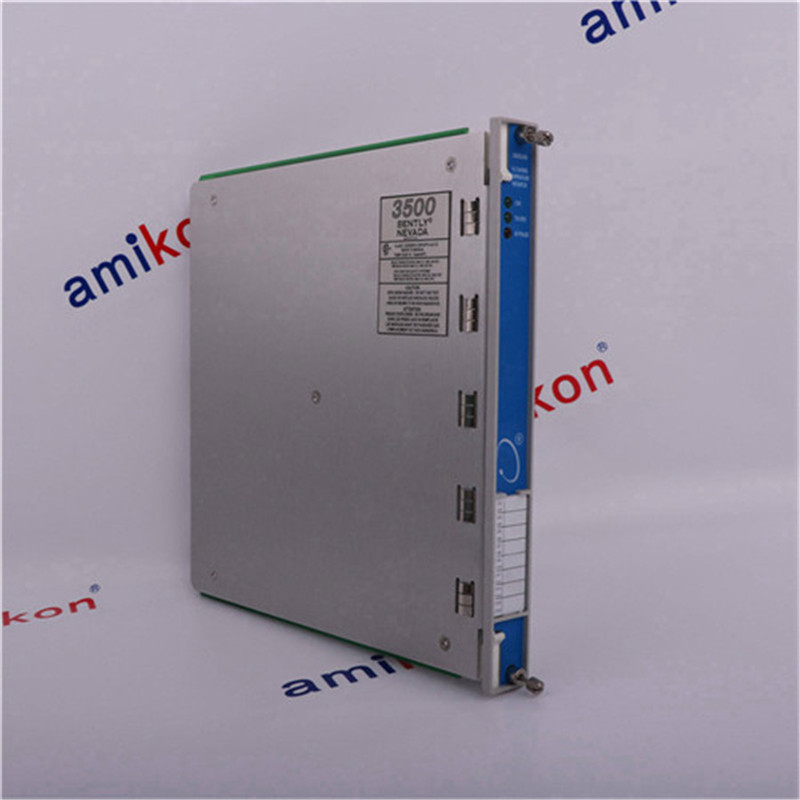
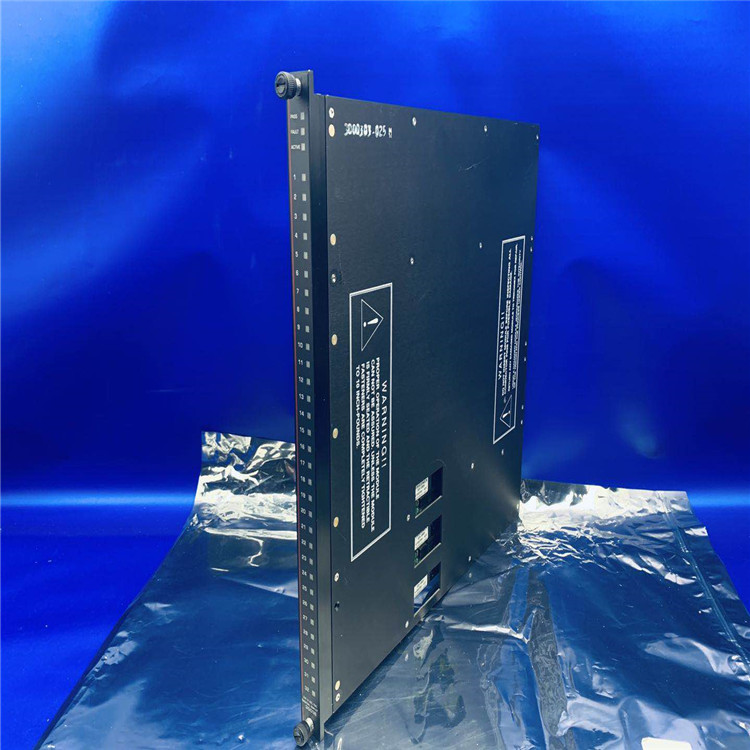
显示装置3500/93
显示装置3500/93
阿米控技术是自动化设备零件、自动化设备配件供应商,为多个行业提供自动化配件,停产的自动化机械零件的**供应商
需通过数据库组态工具生成的数据有以下几类:
⑴ 物理量点组态数据:即实际I/O点,包括通过现场控制站等进行采集、输出的所有外部物理点。如模拟量输入点(AI)、模拟量输出点(AO)、开关量输入点(DI) 、开关量输出点(DO)、脉冲量输入点(PI)、脉冲量输出点(PO) 等,此类点需要手工或通过导入的方式在数据库编辑中组态完成。
⑵ 中间量点组态数据:指通过计算后所得到的新的数据库点,同实际物理测点相比,差别在于没有与物理位置相关的信息,可在控制算法组态和图形组态中使用。如内部模拟量点(AM)、内部开关量点(DM) 等,此类点如果是服务器中的点可以手工或通过导入的方式在数据库编辑中组态完成。如果是现场站中的点需要在控制站算法组态中添加到全局变量表中,通过基本编译后自动加入到数据库中。
数据库内容解释:
点—数据单元或记录,数据库中的一个记录;
项—数据采集单元或处理单元的一个属性,是数据库内的一个字段。
每次做完一个数据库,都要及时编译,将产生的错误及时修改出来,然后*新保存。
4.基本编译:在设备组态编译成功的基础上,数据库编辑完成后可以进行基本编译。它是针对硬件配置及数据库所作的基础性编译,只有基本编译成功后才能进行下文所述的其它组态。
5.服务器算法组态是用来编制服务器算法程序的,它用树型结构表现工程、服务站和控制方案之间的关系。
6.控制器算法组态软件是针对底层控制器的软件。软件安装在工程师站上,作为控制方案的开发平台,包括控制方案编辑器和仿真调试器两部分,主要作用为:
(1)完成用户控制方案的组态,具体包括:用不同的算法语言编写用户控制方案;
(2)仿真调试;
(3)登录控制器,把程序下装到主控单元;运行并在线调试程序。
进入算法组态,**要增加使用的函数库:*.lib文件。常用的有Hsac.lib
控制调节,Hsaired.lib信号选择等函数库。
变量:实时变化的数据,使用前应进行变量声明,如变量名称、数据类型能。常用的数据类型有布尔型(BOOL)、整形(INT、BYTE、WORD等等)、实数型(REAL、LREAL)、字符串型(STRING)、时间型(TIME)、时间日期型、日期时间型、日期型,自定义的一维、二维和三维数组,指针型,枚举型,结构型等。声明时注意变量的使用范围,是局部还是全局变量。
POU为程序组织单元(Program Organization Unit),是控制器算法组态软件作为控制软件的**部分。控制算法组态的过程就是按照设计好的控制方案,创建解决问题所需的一系列POU,在POU中编写相应的控制运算回路。分为3类:
(1)Program:程序型。zui常用的POU类型。定义程序的关键字:PROGRAM 程序名;
(2)Function_Block:功能块型。可以赋予参数并具有静态参数(带有记忆)的POU。当以相同输入参数调用时,FB的输出值取决于其内部变量和外部变量的状态,这些变量在功能块的这一次执行到下一次执行的过程中是保持不变的。定义功能块的关键字:FUNCTION_BLOCK 功能块名;
(3)Function:函数型。可以赋予参数但没有静态参数。当以相同输入参数调用时,它总生成相同的作为其输出。定义函数的关键字:FUNCTION 函数名:数据类型
任何一个POU只有经过触发才能够开始运算。
通过任务配置触发POU 通过POU调用的方法,用已被触发的POU触发其它POU POU语言即算法编程语言,控制器算法组态软件共提供六种编程语言。
FBD(功能块图——Function Block Diagram) LD(梯形图-Ladder Diagram) ST(结构化文本-Structured Text) SFC(顺序功能表图-Sequential Function Chart) IL(指令表-Instruction List) CFC(连续功能图-Continuous Function Chart) 常用FBD和CFC语言。在使用CFC语言时,可以配合F2按键,很方便的调出要用的模块。常用的函数模块有hsaccum积算函数功能块、hsscs顺控功能块、pid调节器功能块等。
控制方案组态完成之后,要进行编译,以检查控制方案组态是否存在错误,并在“信息”窗口中显示编译结果。编译后会生成两个文件:*.SDB和符号表文件*.SYM。
7.下装:把控制方案文件从工程师站传送到主控单元的过程。这要借助于以太网连接来实现。所以在下装前,需要建立工程师站和主控单元间的通讯参数,即『在线』『通讯参数』来设置。通讯参数中设置IP地址。
初始化下装:把全新的目标文件下装到正在运行的主控单元,使主控复位,主控中的所有变量重置初始值:
*次编译工程后下装
执行过“工程”菜单中的“全部清空”命令,将原有的目标文件纪录清除
修改MACS配置
修改目标设置 修改任务配置中的任务属性
主控单元内的程序丢失。
无扰下装即:下装目标文件并没有全部重建,而只在原目标文件的基础上追加修改内容。无扰下装只将修改的部分下装到主控,对于未修改部分是无扰的,对于修改部分视具体修改内容判断。
8.调试:控制器算法组态软件提供在本地计算机中仿真调试的功能。经仿真调试初步检查组态后,便可登录主控下装,在主控中运行程序,再次进行全面的调试;这时用户*连接现场设备,就能在试运行之前测试逻辑的正确性,*大地方便了使用。
厦门阿米控技术有限公司我们公司秉承“顾客至上,锐意进取”的经营理念,坚持“客户至上,信誉为本”的原则为广大客户提供优良安全的服务!“以人为本,诚实做人,诚信做事”是我们的做事准则!
您是第600367位访客
版权所有 ©2024 八方资源网 粤ICP备10089450号-8
厦门阿米控技术有限公司 保留所有权利.
厦门阿米控技术有限公司 保留所有权利.
技术支持: 八方资源网 八方供应信息 投诉举报 网站地图手机网站

微信号码
地址:福建省 厦门 思明区 厦门市思明区湖滨南路388号国贸大厦32楼D单元
联系人:黄瑞东先生(销售工程师)
微信帐号:18030170117